 Globalny angielski
Globalny angielski hiszpański – Español
hiszpański – Español Francuski - Français
Francuski - Français Rosyjski - Pусский язык
Rosyjski - Pусский язык Chinese - 中文
Chinese - 中文 Koreański – 한국어
Koreański – 한국어 Wietnamski – Tiếng Việt
Wietnamski – Tiếng Việt





Wysokowydajny serwonapęd serii SD700
- Pasmo wstępne do 3 kHz
- Zastosuj 23-bitowy enkoder absolutny z szybkością komunikacji 2,5 Mpps
- Solidne sterowanie zapewnia płynną pracę, szeroko stosowane w manipulatorach
- Obsługuje wielostopniową funkcję kontroli wibracji, skutecznie ogranicza rezonans
Omówienie wysokowydajnych serwonapędów serii SD700
Serwonapędy serii VEICHI SD700 to produkty o wysokiej wydajności, niezawodności, wysokiej jakości i opłacalności, które spełniają różnorodne środowiska przemysłowe i krytyczne aplikacje systemowe oraz zapewniają idealne połączenie serwomechanizmu i programu.
Wysokowydajny serwomechanizm ogólnego przeznaczenia SD700——Kompletne połączenie wyrafinowania i prostoty

1. Pasmo odpowiedzi pętli prędkości może osiągnąć 3 kHz.
2. Przy użyciu 23-bitowego enkodera absolutnego prędkość komunikacji może osiągnąć 2,5 Mpps.
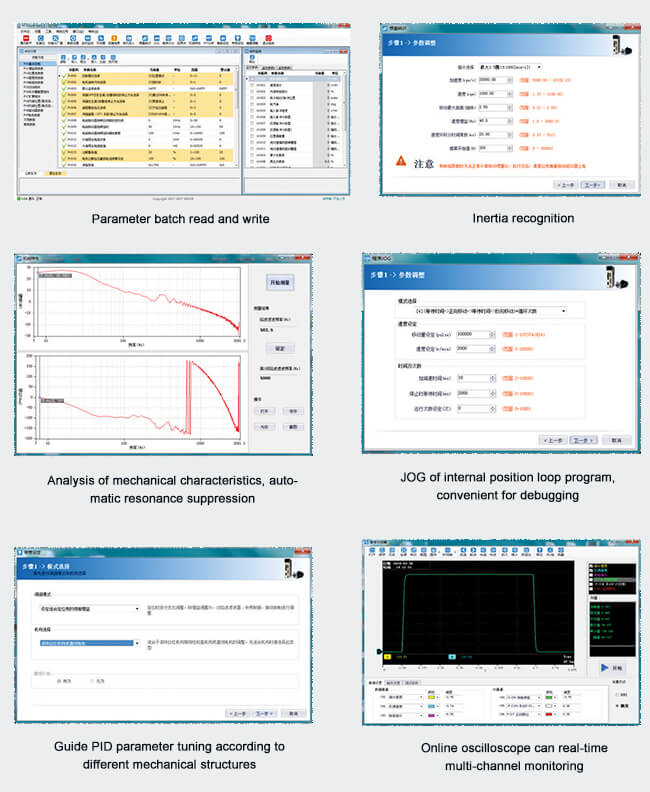
3. Ustawienie przepustowości, automatycznie uzupełnia obliczenia wzmocnienia pętli PID.
4. Wydajne oprogramowanie komputerowe, monitorowanie wielokanałowe, łatwa obsługa.
5. Automatycznie wykonaj identyfikację bezwładności, wzmocnienie pętli, kompensację tarcia i inne ustawienia parametrów.
6. Obsługuje wielostopniową funkcję kontroli wibracji, skutecznie ogranicza rezonans.
7. Solidne sterowanie zapewnia płynną pracę obciążeń z bezwładnością w granicach 30-krotności.
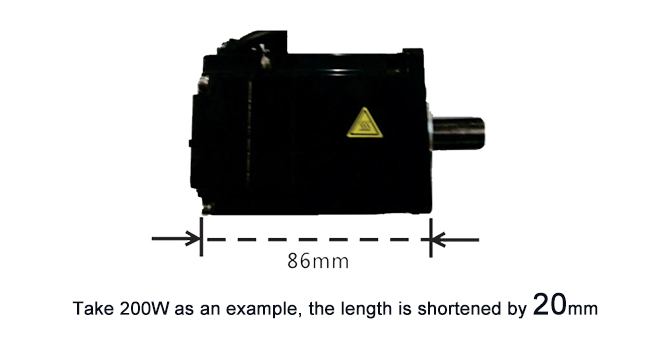
8. Nowy wygląd strukturalny, kompaktowy i oszczędzający miejsce.
Pasmo odpowiedzi pętli prędkości 3 kHz
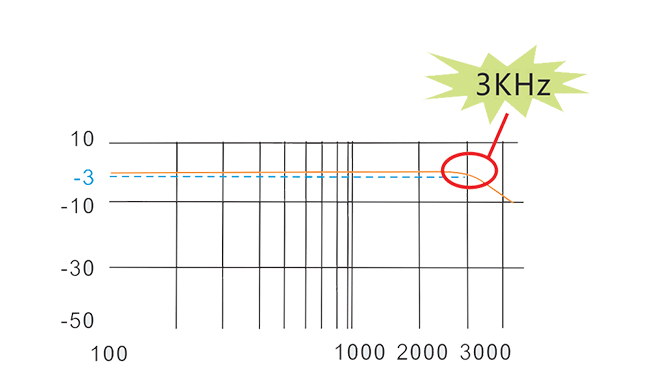
Dzięki unikalnemu algorytmowi pętli prądowej skutecznie zwiększa się szerokość pasma pętli prędkości, a czas ustawiania ulega znacznemu skróceniu. Najszybszy czas wiązania może osiągnąć 1 ms, co poprawia wydajność produkcji.
23-bitowy koder absolutny
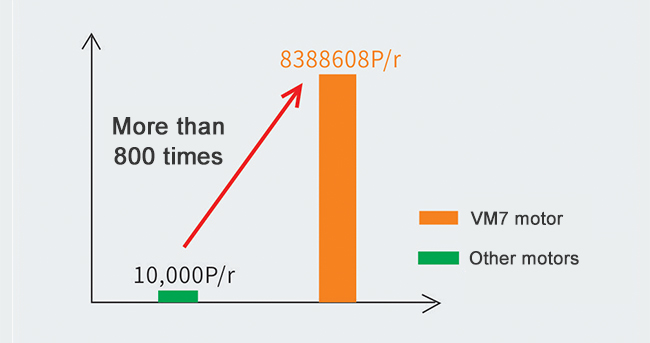
1. Standardowy 23-bitowy wieloobrotowy enkoder absolutny, jednoobrotowy do 8388608 impulsów, prędkość komunikacji do 2,5 Mpps.
2. Pozycjonowanie jest dokładniejsze, niska prędkość jest bardziej stabilna, a pozycja wyłączenia nie zostaje utracona.
Silna kontrola
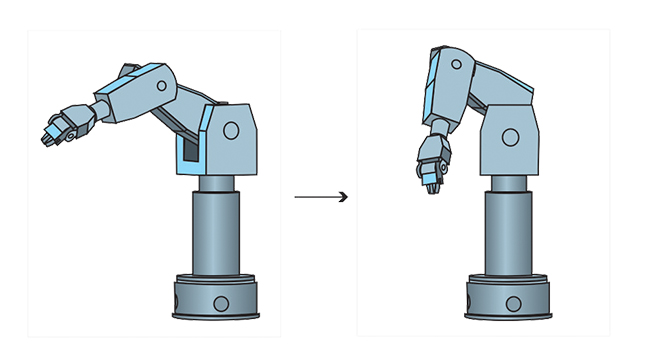
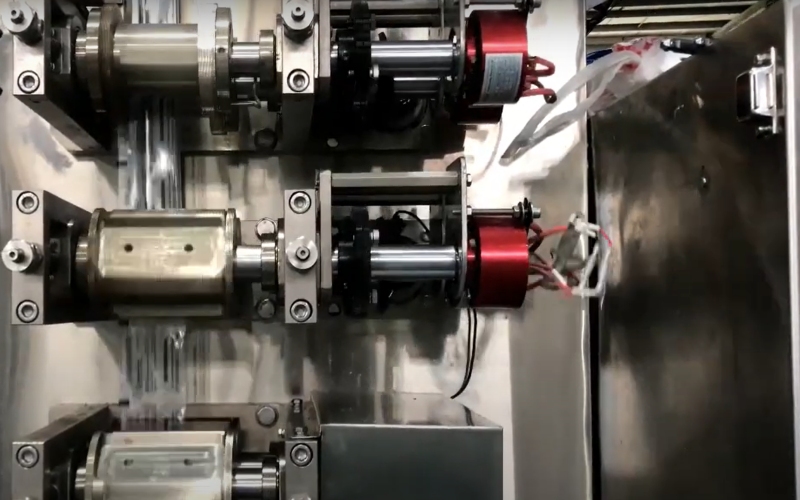
1. Zastosowano nowy algorytm teorii sterowania, aby zdać sobie sprawę, że nawet jeśli moment bezwładności obciążenia zmieni się w ciągu 30 razy podczas ruchu, nie ma potrzeby ustawiania parametrów urządzenia podrzędnego, aby zapewnić płynną pracę.
2. Można go używać po instalacji. Funkcja ta jest szeroko stosowana w manipulatorach.
Obsługa trybu pełnej pętli zamkniętej
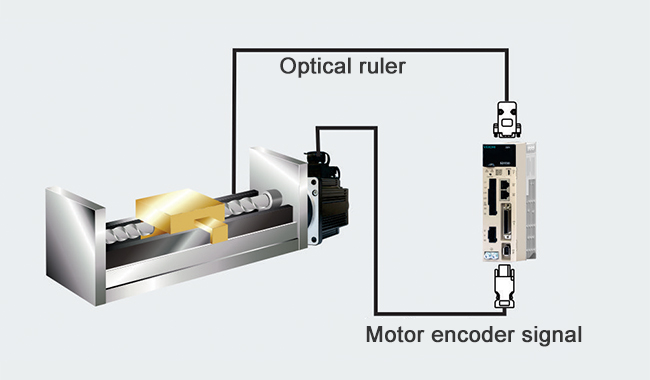
Tryb całkowicie zamkniętej pętli obsługuje zewnętrzny drugi enkoder lub linijkę siatkową, co zmniejsza błędy spowodowane mechaniczną szczeliną przekładni i poprawia dokładność pozycjonowania. Wszystkie modele są wyposażone w tę funkcję.
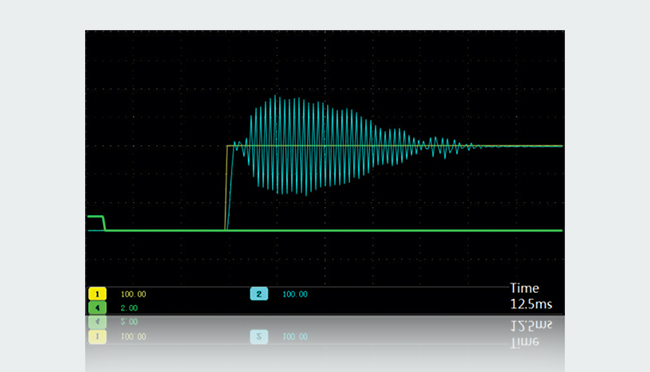
Funkcja kontroli wibracji o niskiej częstotliwości
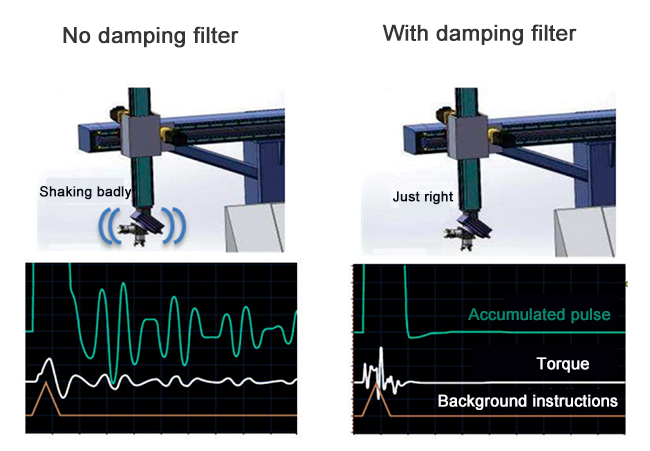
Filtr tłumiący można ustawić za pomocą oprogramowania komputera głównego, co może skutecznie wyeliminować naturalną częstotliwość wibracji, znacznie zmniejszyć wibracje (drgania) wału podczas zatrzymywania i może skutecznie tłumić wibracje o częstotliwości 0 ~ 100 Hz. Ta funkcja jest powszechnie używana w celu wyeliminowania robotów do formowania wtryskowego i układarek. Końcówka trzęsie się po zatrzymaniu.
Automatyczne ustawienie filtra wycinającego
1. Nie ma potrzeby przeprowadzania skomplikowanych pomiarów i analiz częstotliwości drgań, a filtr wycinający można szybko przeszukać i automatycznie ustawić podczas procesu dostrajania parametrów za pomocą funkcji regulacji pojedynczego parametru w komputerze głównym.
2. Prosty i łatwy w obsłudze, najszybszy nie przekracza 70ms. Może znacznie zmniejszyć hałas i wibracje spowodowane rezonansem mechanicznym sprzętu, aby uzyskać szybszą reakcję. Ta funkcja jest szeroko stosowana w obrabiarkach.
Inteligentne ustawienie
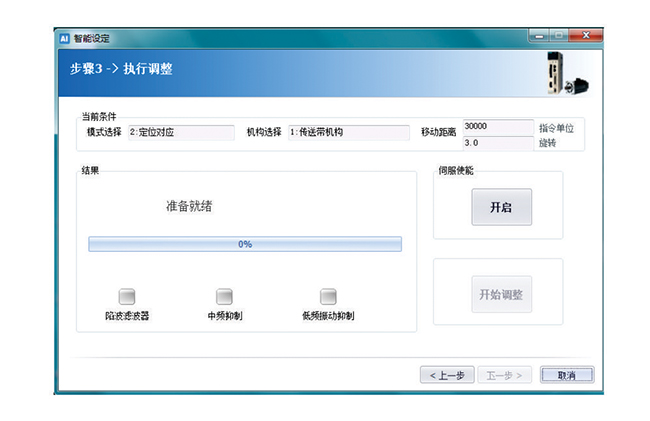
Automatyczna regulacja wzmocnienia, tryb ustawień z przewodnikiem, ustawienie sekwencyjne może zakończyć ustawianie wzmocnienia serwomechanizmu, jest proste i łatwe w użyciu. Zapewnia więcej trybów regulacji, które można dostosować do różnych struktur mechanicznych i charakterystyk procesu, dzięki czemu maszyna może osiągnąć odpowiedni stan.
Zaawansowana funkcja komunikacji autobusowej

Obsługa RS-485, EtherCAT, CANopen, MECHA-METROLINK, MECHATROLINK i innych popularnych magistrali.
Znacznie zmniejsz pulsujący moment obrotowy silnika, a praca przy niskich prędkościach będzie bardziej stabilna.
Wykorzystuje 10-stopniowy rotor i 12-szczelinową konstrukcję wrzeciona. Dzięki specjalnej konstrukcji obwodu magnetycznego efekt zazębienia jest skutecznie tłumiony, a tętnienia momentu obrotowego znacznie zmniejszone, zapewniając w ten sposób płynniejszą pracę silnika przy stałej i niskiej prędkości.
Zaawansowane oprogramowanie komputerowe
1. Nie ma potrzeby instalowania i debugowania oprogramowania.
2. Komunikacja USB między dyskiem a komputerem, łatwa w użyciu.
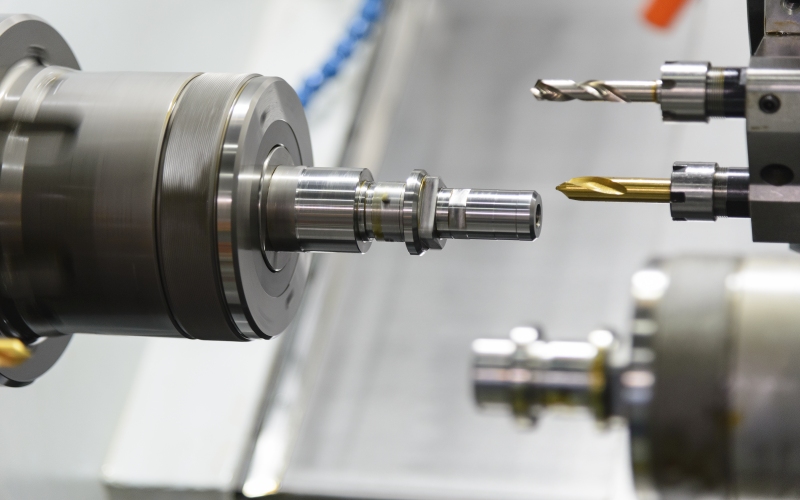
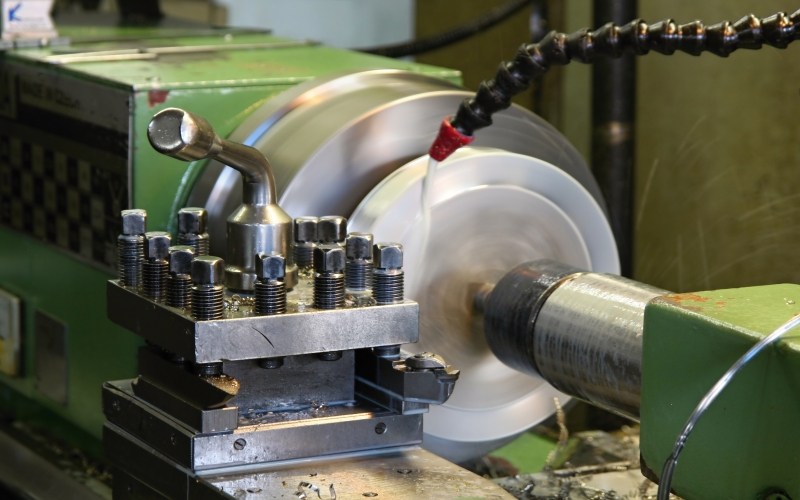
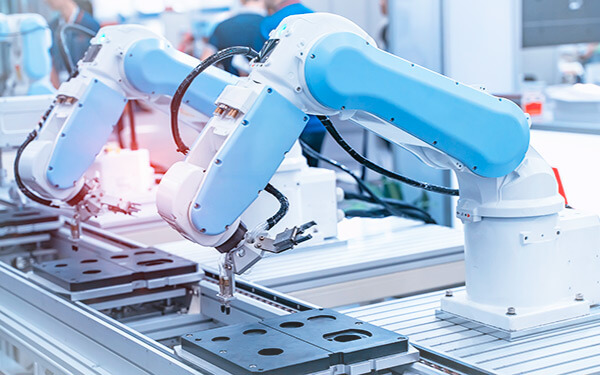
Zastosowania przemysłowe dla wysokowydajnych serwonapędów serii SD700
Zastosowania: elektroniczny sprzęt produkcyjny, sprzęt do sterowania numerycznego, maszyny pakujące, maszyny drukarskie, maszyny tekstylne, maszyny do tworzyw sztucznych i sprzęt szklany, sprzęt testujący itp.
Dane techniczne
| Zakres mocy | 0,1 kW - 55 kW, dostosowane do 250 kW |
|---|
| Tryb sterowania | Sterowanie IGBT, PWM i tryb sterowania prądem sinusoidalnym |
|---|
| Kombinacja silników obrotowych | Enkodery komunikacji szeregowej: 17-bitowe, 20-bitowe i 24-bitowe (enkoder absolutny) Enkoder impulsowy: wojewódzki enkoder liniowy – 2500 linii Enkoder typu transformator obrotowy |
|---|
| Temperatura otoczenia | Temperatura otoczenia: -5 ℃ - 55 ℃ (ogranicz użycie ocen, gdy wynosi 55 ℃ - 60 ℃) |
|---|---|
| Temperatura przechowywania | -20℃~85℃ |
| Wilgotność środowiska pracy | mniej 95% RH (bez zamrażania i oszronienia) |
| Wilgotność przechowywania | mniej 95% RH (bez zamrażania i oszronienia) |
| Odporność na wibracje | 4.9m/s² |
| Odporność na uderzenia | 19.6m/s² |
| Poziom ochrony | IP20 |
| Czystość | Brak gazów żrących i łatwopalnych Bez rozprysków wody, oleju i środków farmaceutycznych Stosowany w środowisku o mniejszym zapyleniu, soli i proszkach metali |
| Wysokość | mniej niż 1000 m (możesz zmniejszyć użycie ocen, gdy jest to 1000-2000 m) |
| Inni | Brak zakłóceń elektryczności statycznej, silnego pola elektrycznego, silnego szumu magnetycznego, promieniowania itp. |
| Odpowiedni standard | EN 61800-5-1:2007 EN 61800-3:2004/A1:2012 |
|---|
| Typ instalacji | Typ montażu na podstawie: wszystkie modele Typ montażu na półce: wszystkie modele |
|---|
| Zakres regulacji prędkości | 1:6000 (dolna granica zakresu regulacji prędkości to wartość w warunkach pracy ciągłej przy obciążeniu momentem znamionowym) |
|---|---|
| Współczynnik wahań prędkości | Wahania obciążenia: Mniej ± 0,01% prędkości znamionowej (wahania obciążenia: 0% -100%) Wahania napięcia: 0% prędkości znamionowej (±10% napięcia znamionowego) Wahania temperatury: poniżej ± 0,1% prędkości znamionowej (wahania temperatury: 25 ± 25°C) |
| Dokładność kontroli momentu obrotowego | ±1% |
| Ustawienie czasu miękkiego startu | 0 ~ 10 s (przyspieszanie i zwalnianie można ustawić osobno) |
|---|
| RS-485 | Komunikacja 1:N: W przypadku korzystania z portu RS-485, N max = 127 stacji Ustawienie pozycji osi: poprzez ustawienie parametrów |
|---|---|
| Komunikacja USB | Podłączony sprzęt:Komputer Protokół: zgodnie ze specyfikacją USB1.1 (12M) |
| Funkcja wyświetlania | Wskaźnik ładowania |
|---|
| Funkcja obsługi panelu | Przełącznik przyciskowy × 4 |
|---|
| Wyjście impulsowe dzielnika enkodera | Faza A, faza B i faza C: liczba impulsów częstotliwości transmisji napędu liniowego może być dowolnie ustawiana |
|---|---|
| Sekwencja sygnału wejściowego | Wejście stałe: Zakres napięcia roboczego: DC 5 V ± 5% Stałe wejście: Punkty wejściowe: 1 punkt Wejście stałe: sygnał wejściowy żądania danych bezwzględnych (SEN) enkodera |
| Sekwencja sygnału wejściowego | Przypisywalny sygnał wejściowy: Zakres napięcia roboczego: DC24V±20% Przypisywany sygnał wejściowy: Punkty wejściowe: 9 punktów Przypisywany sygnał wejściowy: Metoda wprowadzania: wejście wspólnego kolektora i wejście wspólnego emitera Przypisywany sygnał wejściowy: Sygnał wejściowy Przypisywany sygnał wejściowy: Serwo WŁ. (/S-ON) Przypisywany sygnał wejściowy: tryb P/P-CON Przypisywany sygnał wejściowy: sygnał przełącznika zwalniania z resetem do położenia początkowego (/DEC) Przypisywany sygnał wejściowy: zakaz jazdy do przodu (P-OT) i zakaz jazdy do tyłu (N-OT) Przypisywalny sygnał wejściowy: Reset alarmu (/ALM-RST) Przypisywany sygnał wejściowy: zewnętrzne ograniczenie momentu w przód (/P-CL) i zewnętrzne ograniczenie momentu w tył (/N-CL) Przypisywany sygnał wejściowy: sygnał wyboru kierunku obrotu prędkości (/SPD-D). Przypisywany sygnał wejściowy: Przełącznik trybu sterowania (/C-SEL) Przypisywany sygnał wejściowy: ustalanie pozycji zerowej (/ZCLAMP) Przypisywany sygnał wejściowy: Blokada impulsu poleceń (/INHIBIT) Przypisywany sygnał wejściowy: Sygnał wejściowy wykrywania bieguna magnetycznego (/P-DET). Przypisywany sygnał wejściowy: Przełączanie wzmocnienia (/G-SEL) Przypisywany sygnał wejściowy: Przełącznik obejścia sygnału wejściowego impulsu sterującego (/PSEL) Przypisywany sygnał wejściowy: sygnał wejściowy SEN (/SEN). Przypisywalny sygnał wejściowy: przypisywane sygnały i zmienna logika dodatnia/ujemna |
| Sekwencyjny sygnał wyjściowy | Stałe wyjście: Zakres napięcia roboczego: DC5V~30V Stałe wyjście: Punkty wyjściowe: 1 punkt Stałe wyjście: Sygnał wyjściowy: alarm serwo (ALM) |
| Sekwencyjny sygnał wyjściowy | Przypisywalny sygnał wyjściowy: Zakres napięcia roboczego: DC5V~30V Przypisywany sygnał wyjściowy: Punkty wyjściowe: 3 punkty Przypisywalny sygnał wyjściowy: Metoda wejścia: wyjście sprzęgające optoelektroniczne (typ izolowany) Przypisywany sygnał wyjściowy: Sygnał wyjściowy Przypisywany sygnał wyjściowy: Zakończono pozycjonowanie (/COIN) Przypisywalny sygnał wyjściowy: Kaseta obrotowa (/TGON) Przypisywany sygnał wyjściowy: Gotowość serwa (/S-RDY) Przypisywalny sygnał wyjściowy: wykrywanie ograniczenia momentu obrotowego (/CLT) Przypisywalny sygnał wyjściowy: Kontrola ograniczenia prędkości (/VLT) Przypisywany sygnał wyjściowy: Hamulce (/BK) Przypisywany sygnał wyjściowy: Ostrzeżenie (/WARN) Przypisywany sygnał wyjściowy: zlokalizuj w pobliżu (/NEAR) Przypisywalny sygnał wyjściowy: przypisywane sygnały i zmienna logika dodatnia/ujemna |
| Hamulec dynamiczny | Działanie przy wyłączonym zasilaniu obwodu głównego, alarm serwa, wyłączenie serwa i nadmierny skok (OT) |
|---|
| Regeneracyjny | Wbudowana funkcja |
|---|
| Zabezpieczenie przed nadmiernym przemieszczeniem (OT). | Zatrzymanie hamulca dynamicznego (DB), zatrzymanie zwalniania lub zatrzymanie swobodne podczas działania wejścia P-OT lub N-OT |
|---|
| Funkcja ochronna | Przetężenie, przepięcie, podnapięcie, przeciążenie, awarie regeneracyjne itp. |
|---|
| Funkcja dostępności | Regulacja wzmocnienia, zapisy alarmów, operacja JOG, wyszukiwanie pochodzenia itp. |
|---|
| Wejście | STO: podstawa sygnału blokującego moduł mocy |
|---|
| Kontrola pozycji | Kompensacja sprzężenia do przodu: 0% ~ 100% |
|---|---|
| Kontrola pozycji | Ustalenie zasięgu lokalizacji: 0 ~ 1073741824 jednostek instrukcji |
| Kontrola pozycji | Sygnał wejściowy: Impuls poleceń: Forma impulsu poleceń: Wybierz jedną z poniższych opcji Sygnał wejściowy: Impuls poleceń: Forma impulsu poleceń: Sekwencja symboli i impulsów, sekwencja impulsów CW+CCW, różnica faz 90° i impuls dwufazowy Sygnał wejściowy: Impuls sterujący: Forma wejściowa: Napęd liniowy i otwarty kolektor Sygnał wejściowy: Impuls sterujący: Maksymalna częstotliwość wejściowa: Sterownik linii Sygnał wejściowy: Impuls poleceń: Maksymalna częstotliwość wejściowa: Symbol + sekwencja impulsów, sekwencja impulsów CW + CCW: 4Mpps Sygnał wejściowy: Impuls sterujący: Maksymalna częstotliwość wejściowa: różnica faz 90°, impuls dwufazowy: 1 Mpps Sygnał wejściowy: Impuls sterujący: Maksymalna częstotliwość wejściowa: Otwarty kolektor Sygnał wejściowy: Impuls poleceń: Maksymalna częstotliwość wejściowa: Symbol + sekwencja impulsów, sekwencja impulsów CW + CCW: 200 Kpps Sygnał wejściowy: Impuls sterujący: Maksymalna częstotliwość wejściowa: Różnica faz 90° Impuls dwufazowy: 200 Kpps Sygnał wejściowy: Impuls poleceń: Przełącznik obejścia sygnału wejściowego: 1~100 razy Sygnał wejściowy: Sygnał wyraźny: Kasowanie odchylenia pozycji |
| Kontrola prędkości | Ustawienie czasu miękkiego startu: 0 ~ 10 s (przyspieszanie i zwalnianie można ustawić osobno) |
| Kontrola prędkości | sygnał wejściowy: Napięcie sterujące: Maksymalne napięcie wejściowe: ±10 V (obrót silnika do przodu, gdy zadane jest napięcie dodatnie) sygnał wejściowy: Napięcie sterujące: Prędkość znamionowa przy 6V DC [ustawienie fabryczne] sygnał wejściowy: Napięcie sterujące: Zmienne ustawienie wzmocnienia wejściowego sygnał wejściowy: Rezystancja wejściowa: Około 14KΩ sygnał wejściowy: Parametr czasu pętli: 30μs |
| Kontrola prędkości | Wewnętrznie ustawiona kontrola prędkości: Wybór kierunku obrotu: Użyj sygnału sterującego P Wewnętrznie ustawiona kontrola prędkości: Wybór prędkości: Za pomocą wejścia sygnału zewnętrznego ograniczenia momentu obrotowego do przodu/do tyłu Wewnętrznie ustawiona kontrola prędkości: Wybór prędkości: Zatrzymanie lub zmiana na inny tryb sterowania, gdy obie strony są wyłączone |
| Kontrola momentu obrotowego | Sygnał wejściowy: Napięcie sterujące: Maksymalne napięcie wejściowe: ±10 V (dodatnie obroty silnika, gdy zadane jest napięcie dodatnie) Sygnał wejściowy: Napięcie sterujące: Prędkość znamionowa przy 6 V DC [ustawienie fabryczne] Sygnał wejściowy: Napięcie sterujące: Zmienne ustawienie wzmocnienia wejściowego |
| Kontrola momentu obrotowego | Sygnał wejściowy: Rezystancja wejściowa: Około 14 KΩ Sygnał wejściowy: Parametr czasu pętli: 16μs |
Pliki do pobrania
| Nazwa pliku | Typ | Język | Typ pliku | Aktualizacja | Pobierz |
|---|---|---|---|---|---|
| CE (EMC) of SD700 Servo Drive | Certificate | English | 2018-07-06 | 283KB | |
| Oprogramowanie do debugowania górnego komputera V1.6.10 | Software | język angielski | ZIP | 2024-03-26 | 18.6MB |
| Instrukcja techniczna serwomechanizmu serii SD700 V1.1 | Manual | język angielski | 2024-03-26 | 9.04MB | |
| CE (LVD) of SD700 Servo Drive | Certificate | English | 2018-07-06 | 283KB | |
| Oprogramowanie doboru serwa v1.3 | Software | English | ZIP | 2024-03-28 | 587KB |
| SD700 Servo Drive Catalog V1.1 | Catalog | English | 2022-04-07 | 14.7MB | |
| Rozwiązanie dla przemysłu obrabiarkowego | Catalog | język angielski | 2024-03-26 | 10MB | |
| Serwo miękkie serii SD700 i 710 i 780 V2.4-EN | Software | język angielski | ZIP | 2024-03-26 | 51.8MB |
| SD700 Servo Drive Manual V1.4 | Manual | English | 2020-10-20 | 4.99MB | |
| SD700 Series Servo Soft V1.6-Turkey | Software | Turkish | ZIP | 2019-09-20 | 90MB |
| Pliki serwo 3D serii SD700 | CAD File | język angielski | ZIP | 2024-03-28 | 25.2MB |
| Katalog serwonapędów SD700 dla telefonu | Catalog | język angielski | 2024-03-26 | 8.76MB | |
| Serwo serii SD700 ECAT V1.1 G | Manual | język angielski | ZIP | 2024-03-26 | 9.74KB |
| Wybór serwa (A1.7) V1.2 | Software | język angielski | ZIP | 2024-03-26 | 812MB |
| SD700 Profinet XML V1.0 | Manual | język angielski | ZIP | 2024-03-26 | 12.3MB |
| SD700 Ethercat XML V1.0 | Manual | język angielski | ZIP | 2024-03-26 | 3.88MB |
| Instrukcja obsługi SD700 wersja 1.0 | Manual | język angielski | 2024-03-26 | 10.4M | |
| Instrukcja komunikacji SD700 EtherCAT, wersja 1.0 | Manual | język angielski | 2024-03-26 | 5.19M | |
| SD700 Opis błędu EtherCat V1.0 | Manual | język angielski | 2024-03-26 | 132KB | |
| Wybór serwa V1.0.8 | Software | język angielski | ZIP | 2024-03-26 | 652KB |
| Instrukcja bezpiecznego wyłączania momentu obrotowego SD700 | Manual | język angielski | 2024-03-26 | 671KB |
























 Leave a Message
Leave a Message