 Globalny angielski
Globalny angielski hiszpański – Español
hiszpański – Español Francuski - Français
Francuski - Français Rosyjski - Pусский язык
Rosyjski - Pусский язык Chinese - 中文
Chinese - 中文 Koreański – 한국어
Koreański – 한국어 Wietnamski – Tiếng Việt
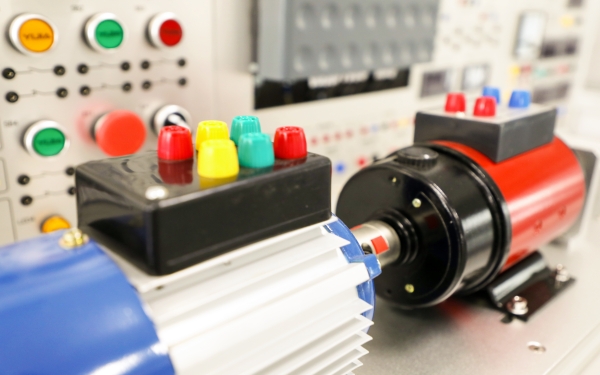
Wietnamski – Tiếng ViệtNapęd prądu przemiennego o częstotliwości AC310 używany w tokarce do łuszczenia forniru w Wietnamie

Przegląd projektu
Miejsce: Fabryka
Data: maj 2022 r.
Lokalizacja: Wietnam
Branża: Obrabiarki
Zakres projektu: Wysokowydajne falowniki ze sterowaniem wektorowym stosowane w przemyśle drzewnym
Dostawy VEICHI: Napęd AC serii AC310
Przegląd
Rozwiązanie tokarki do łuszczenia forniru opracowane przez firmę Veichi Electric ma zalety jednolitej grubości, gładkiej powierzchni, małego błędu ostatniego forniru i wysokiego stopnia wykorzystania drewna.
Zasada działania tokarki do łuszczenia forniru
Schemat działania tokarki do łuszczenia forniru pokazano poniżej. Kłoda wykonuje ruch obrotowy pod wpływem dwóch nieruchomych rolek i jednej ruchomej rolki, wytwarzając siłę zdzierania. Wspornik środkowy rolki napędowej i nóż są względnie nieruchome i poruszają się razem, w ten sposób nóż wycina fornir z kłody. Natomiast grubość forniru kontrolowana jest poprzez odstęp pomiędzy poruszającym się wałkiem a krawędzią noża oraz prędkość poruszania się noża. Szczelina pomiędzy ruchomym wałkiem a krawędzią noża jest względnie stała i regulowana przez sprzęt tokarski w zależności od grubości forniru. System sterowania reguluje prędkość noża poprzez sterowanie prędkością obrotową silnika, dzięki czemu prędkość noża będzie pośrednio determinować grubość forniru. Jak wynika z poniższego wykresu, prędkość obrotowa walca napędowego jest stała, co oznacza stałą prędkość liniową kłody. Trwałość kłody będzie zmieniać się wraz z jej średnicą, innymi słowy, czas potrzebny kłodzie do obrócenia koła będzie się zmieniał zgodnie z poprzednią zmianą. Podsumowując, prędkość poruszania się noża jest wartością zmienną i zależnością nieliniową. Bardzo ważne jest zaprojektowanie systemu, który będzie w stanie dokładnie kontrolować prędkość ruchu noża i uzyskać jednolitą grubość forniru. Podstawowe założenia projektu systemu to:
(1) Ustalenie dokładnego trybu matematycznego.
(2) Przejęcie oryginalnego systemu kontroli prędkości, aby uzyskać dokładną kontrolę prędkości.


Zalety VEICHI AC310 w tokarce do obierania forniru
1. System, który integruje w pełni cyfrowy system sterowania i przetwornicę częstotliwości, poprawia reakcję i eliminuje potrzebę stosowania sterownika PLC o dużej objętości. Może znacznie obniżyć koszty, czyniąc przetwornicę częstotliwości źródłem zasilania napędu wrzeciona, a także rdzeniem sterującym systemu.
2. Zastosowanie zaawansowanych algorytmów i metod kompensacji może skutkować dokładną, jednolitą i pełną grubością licówki.
3. Użycie enkodera obrotowego jako czujnika odległości może zwiększyć dokładność pomiaru do 0,01 mm.
4. Użycie enkodera obrotowego do pomiaru rzeczywistej prędkości obrotowej platformy mobilnej pozwala uniknąć błędu grubości forniru spowodowanego niestabilnym napięciem sieciowym.
5. Podanie komunikacji RS485 doprowadzi do mniejszej liczby błędów.
6. Wiele możliwości wyboru różnych trybów kombinacji czujników może zaspokoić potrzeby klientów wymagania w największym stopniu.
7. W przypadku awarii zasilania system może kontynuować pracę bez autotestu, co zapewnia dużą wygodę.

Rozwiązania elektryczne
Schemat połączeń
Zaciski AC310

Przełącznik zasilania

Główne parametry i procedury debugowania
F0.20=1
F2.10=0011
Pierwszy----
F5.01=Liczba biegunów silnika
F5.02=Moc znamionowa silnika< br />F5.03=Częstotliwość znamionowa silnika
F5.04=Prędkość znamionowa silnika
F5.05=Napięcie znamionowe silnika
F5.06=Prąd znamionowy silnika
F5.19 =Rozszerzona wartość impulsu PG
Druga----F5.12=2
Następnie ---Kliknij przycisk FWD klawiatury
Gdy przycisk FWD jest zielony Światło jest wyłączone, automatyczne badanie dobiegł końca.
HMI
drewno ∮----drewno Rzeczywista średnica
PeelFrqc----częstotliwość podawania
OCrrnt----prąd wyjściowy
PeelThick----PeelThick
Rzeczywista średnica- ---kalibracja średnicy
Resztkowa średnica ----pozostała średnica
FastForwdFrqc----Szybka częstotliwość do przodu
FastRtrt----Szybka częstotliwość do tyłu
AutoRtrt----Auto częstotliwość wsteczna
AutoStartPstn----Automatyczna pozycja startowa
RollerStartPstn---- Pozycja początkowa rolki
MaxWood ∮----Max średnica drewna
MinWood ∮----Min średnica drewna
ForwardMode----Tryb do przodu 0:rolka i do przodu Jednoczesny start
LeadScrewPitch----Skok śruby pociągowej
Enkoder----Enkoder= (Rzeczywisty enkoder*a ) /B; a: Podział częstotliwości PG b=przełożenie
TransmissionRatio---przełożenie -----rzeczywiste
FixedRollers∮----Stała średnica rolek
FixedRllrCntrDist----Stała odległość od środka rolek
FixRollerSpeed----prędkość rolek
PGFrequcyDivision----podział częstotliwości PG ≈ przełożenie(zaokrąglenie)
Pozostałe parametry nie są istotne, więc możesz je zignorować.












 Leave a Message
Leave a Message