 Globalny angielski
Globalny angielski hiszpański – Español
hiszpański – Español Francuski - Français
Francuski - Français Rosyjski - Pусский язык
Rosyjski - Pусский язык Chinese - 中文
Chinese - 中文 Koreański – 한국어
Koreański – 한국어 Wietnamski – Tiếng Việt
Wietnamski – Tiếng ViệtCo to jest algorytm sterowania PID
W praktycznych zastosowaniach inżynierii algorytm regulacji PID jest najczęściej używanym algorytmem. Poniższy fragment stanowi szczegółowe wprowadzenie do algorytmu sterowania PID.
Jaka jest zasada działania algorytmu sterowania PID?
Najpowszechniej stosowane prawo regulacji regulatora w zakresie regulacji proporcjonalnej, całkowej i różnicowej określane jest jako algorytm regulacji PID, znany również jako regulacja PID lub regulacja PID. Sterowniki PID mają prawie 70-letnią historię. Prosta konstrukcja, dobra stabilność i niezawodne działanie stały się jedną z głównych technologii sterowania przemysłowego. Gdy nie jest w pełni podana struktura i parametry sterowanego obiektu, konstrukcję i parametry sterownika systemu należy oprzeć na doświadczeniu i uruchomieniu na miejscu, a zastosowanie technologii regulacji PID jest najwygodniejszą technologią. W przypadku algorytmu regulacji PID rozróżnia się regulację PI i regulację PD. Sterownik PID działa na zasadzie obliczania wartości regulacji proporcjonalnej, całkującej i różnicowej.
Obecnie istnieją 3 rodzaje stosunkowo prostych algorytmów regulacji PID, a mianowicie: algorytm przyrostowy, algorytm typu pozycji, algorytm różnicowy. Te algorytmy sterujące są najprostszymi i podstawowymi algorytmami, które mają swoją własną charakterystykę i spełniają ogólne wymagania większości kontroli.
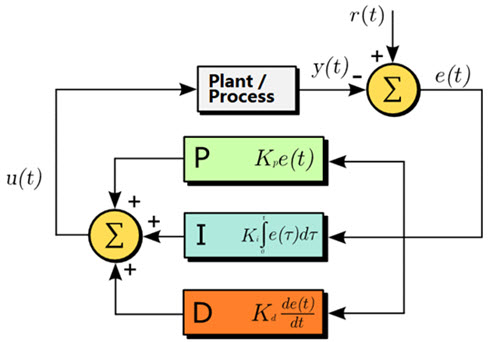
Pełny wzór jest następujący:
u (t) = Kp * e (t) + KiSe (t) + Kd [e (t) - e (t-1)] + u0
W procesie debugowania algorytmu regulacji PID należy zwrócić uwagę na następujące kroki:
1. Zamknij I i D, co oznacza ustawienie ich na 0 i zwiększenie P, aby wytworzyć oscylacje;
2. Zmniejsz P, aby znaleźć krytyczny punkt oscylacji;
3. Zwiększ I, aby osiągnąć wartość docelową;
4. Ponownie zasil, aby sprawdzić, czy czas przeregulowania, oscylacji i stabilizacji jest zgodny z wymaganiami;
5. Odpowiednio dodaj kilka terminów różniczkowych dla warunków przeregulowania i oscylacji;
Metody dostrajania parametrów kontrolera PID
Dostrajanie parametrów regulatora PID jest podstawą projektowania wektorowego systemu sterowania silnikiem. Istnieje wiele metod dostrajania parametrów regulatora PID, które można podsumować w dwóch kategoriach:
1. Teoretyczne strojenie obliczeń. Wyznacza parametry regulatora na podstawie modelu matematycznego i obliczeń teoretycznych. Dane obliczone tą metodą nie mogą być bezpośrednio wykorzystywane i należy je korygować i modyfikować.
2. Metoda dostrajania inżynieryjnego, która opiera się głównie na doświadczeniu inżynierskim do bezpośredniego przeprowadzenia w testach systemu sterowania, a metoda jest łatwa do zrozumienia i jest szeroko stosowana w praktyce inżynierskiej. W przypadku metod dostrajania parametrów regulatora PID wyróżnia się metodę współczynnika krytycznego, metodę krzywej odpowiedzi i metodę zaniku.
Metody mają swoją własną charakterystykę, dlatego wszystkie są najpierw testowane, a następnie powstaje inżynieryjny wzór empiryczny umożliwiający wdrożenie dostrajania parametrów sterownika. Obecnie system sterowania PID jest szeroko stosowany w automatyce PLC i napędach o zmiennej częstotliwości, przy czym najczęściej stosowaną metodą jest metoda współczynnika krytycznego.
Jeśli chcesz dowiedzieć się więcej o systemie sterowania PID i jego zasadzie działania, nie wahaj się z nami skontaktować, a nasze wsparcie techniczne wkrótce Ci odpowie.